


Rubiks cube robot human controller self solving – Rubik’s Cube robot human controller self solving explores the fascinating intersection of robotics, human interaction, and sophisticated algorithms. Imagine a robot meticulously manipulating a Rubik’s Cube, guided by a human controller or autonomously solving it with its own internal programming. This journey delves into the intricate mechanisms, control systems, and algorithms driving such a complex task, examining the advantages and disadvantages of both human-controlled and autonomous approaches.
From detailed robotic mechanisms and sensor integration to human input interfaces and the logic behind self-solving algorithms, this exploration provides a comprehensive overview of the technological marvels involved in such a sophisticated project. The integration of these elements is also critically examined to understand how they interact, complement each other, and overcome the challenges involved.
Robot-Controlled Rubik’s Cube

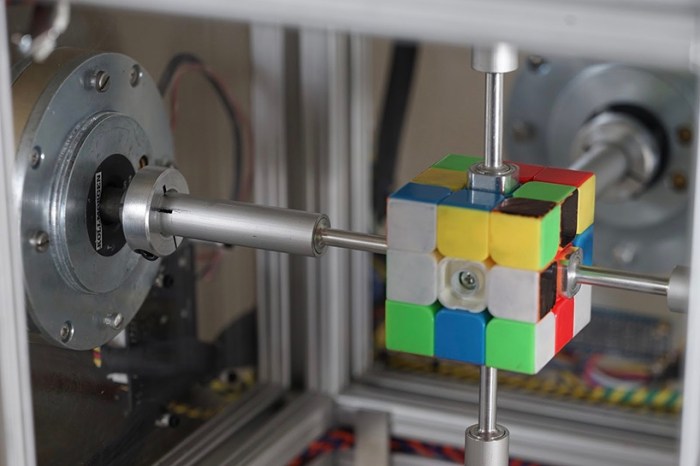
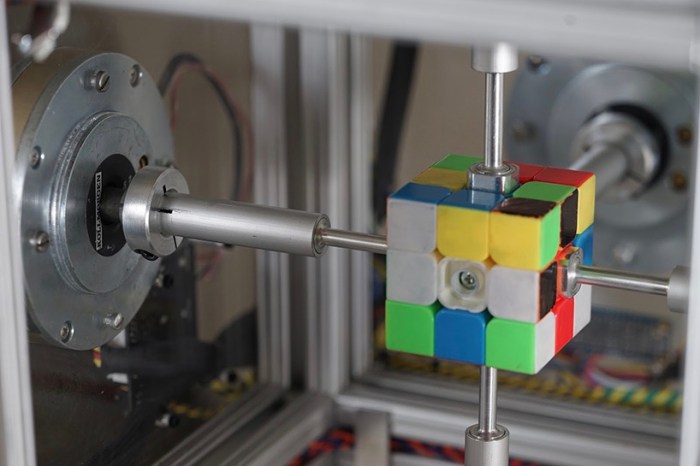
A Rubik’s Cube, a deceptively simple puzzle, presents a fascinating challenge for robotics. The ability to program a robot to manipulate and solve this iconic cube highlights advancements in robotics, control systems, and artificial intelligence. This exploration delves into the mechanics, different robotic mechanisms, control systems, and a practical solving process for a robot-controlled Rubik’s Cube.Robotic control of a Rubik’s Cube involves precise manipulation of the cube’s facets.
This necessitates intricate coordination between the robot’s actuators, sensors, and control algorithms. The complexity arises from the need for the robot to accurately identify the cube’s state, plan a solution, and execute the movements with minimal errors. The control system acts as the brain, guiding the robotic arm through the necessary twists and turns to reach the solved configuration.
Robotic Mechanisms for Rubik’s Cube Manipulation
Various robotic mechanisms can be used to manipulate a Rubik’s Cube. The choice depends on factors such as the size of the cube, the required precision, and the available space. For instance, a robotic arm with a gripper is suitable for manipulating a standard Rubik’s Cube, while specialized micro-manipulators might be better for miniature versions.
Different Types of Robotic Arms
A wide range of robotic arms are suitable for the task. Industrial robots with high payload capacity and repeatability can be employed. Alternatively, smaller, more dexterous robotic arms, often used in assembly lines or pick-and-place operations, can achieve the required precision. The selection depends on the specific design requirements and available resources.
Control Systems for Cube Solving
Various control systems can direct the robot’s actions. A simple approach utilizes pre-programmed sequences for common moves. More sophisticated methods employ algorithms that analyze the cube’s state and generate optimal solution paths. These algorithms may be based on heuristics or advanced search techniques. The efficiency of the control system directly impacts the robot’s solving time.
A Simple Step-by-Step Process for Robot Solving, Rubiks cube robot human controller self solving
1. Initialization The robot identifies the initial state of the Rubik’s Cube using sensors. This step involves determining the position of each colored tile.
2. Algorithm Selection The control system selects an appropriate algorithm (e.g., a pre-programmed solution or a heuristic algorithm) based on the initial state.
3. Move Planning The robot plans the sequence of twists and turns needed to execute the algorithm. This involves calculating the specific rotations required for each step.
4. Actuator Control The robot’s actuators are controlled to perform the planned moves. This involves precisely rotating the cube’s faces.
5. Verification After each move, sensors confirm that the move was correctly executed.
6. Iteration The process repeats until the Rubik’s Cube is solved.
Sensors for Rubik’s Cube Interaction
The following table details the various sensor types used for a robot to interact with the Rubik’s Cube.
| Sensor Type | Description | Advantages | Disadvantages |
|---|---|---|---|
| Color Sensors (RGB) | Detect the color of each face of the cube. | Accurate color identification, crucial for understanding the cube’s state. | Can be affected by lighting conditions. |
| Position Sensors (encoders) | Measure the angle of rotation of the cube’s faces. | Precisely measure rotation, critical for accurate movement. | Requires calibration and can be affected by external forces. |
| Proximity Sensors | Detect the presence of obstacles around the cube. | Avoid collisions during manipulation. | May not be as accurate for detecting specific colors. |
| Camera Sensors (with image processing) | Provide a visual representation of the cube’s state. | Comprehensive view of the cube, allowing for more complex algorithms. | Computationally intensive, susceptible to lighting conditions and occlusions. |
Human-Controlled Rubik’s Cube: Rubiks Cube Robot Human Controller Self Solving
While robots are increasingly capable of solving Rubik’s Cubes autonomously, human control offers unique advantages in certain scenarios. A human controller can introduce flexibility and adaptability to the process, allowing for adjustments based on real-time observations and unexpected situations. This approach is particularly useful when dealing with complex or poorly defined environments where a pre-programmed algorithm might struggle.
The Role of a Human Controller
A human controller acts as a crucial intermediary between the Rubik’s Cube-solving robot and the desired outcome. They provide real-time guidance to the robot, dictating the sequence of moves to solve the cube. This human oversight is valuable for several reasons, including handling unexpected obstacles, adapting to variations in the cube’s initial state, and introducing creative solutions that might not be anticipated by a purely algorithmic approach.
The human element can also be essential for error correction and ensuring smooth operation of the robotic system.
Input Methods for Human Control
Various input methods can be employed to control a robot solving a Rubik’s Cube. The best approach depends on the complexity of the robot’s capabilities and the desired level of control.
- Direct Physical Manipulation: A human could physically guide the robot’s arms to perform specific moves on the Rubik’s Cube. This method provides direct, real-time control but is limited in speed and precision, especially for complex sequences. Imagine a joystick controlling a robotic arm to rotate the cube faces.
- Graphical User Interface (GUI): A graphical interface allows the human to visually interact with the robot’s actions. Buttons or icons on a screen could represent specific cube rotations, allowing for precise and efficient control. This is a common method in many robotic systems.
- Voice Control: Voice commands can be used to direct the robot, enabling hands-free operation. This method is particularly useful in situations where the human’s hands are occupied or when performing complex sequences. For example, the user could say “rotate the top layer clockwise,” which the robot interprets and executes.
- Gesture Recognition: Specialized sensors could detect hand gestures to control the robot. This method offers a natural and intuitive way to interact with the system. A user could make a gesture to indicate a specific rotation, which the robot’s sensors then interpret. This can be more intuitive than using a keyboard or mouse.
Advantages and Disadvantages of Human Control
Human control of a Rubik’s Cube-solving robot offers several advantages, but it also presents some challenges.
- Advantages: Flexibility, adaptability, error correction, and creative problem-solving.
- Disadvantages: Human error, limited speed, and potential for inconsistent control. The human controller might get distracted or make mistakes during complex rotations.
Examples of Human-Robot Interaction Interfaces
Numerous interfaces have been developed for human-robot interaction in various contexts, many of which can be adapted for controlling a robot to solve a Rubik’s Cube.
| Interface Type | Description | Pros | Cons |
|---|---|---|---|
| Direct Physical Manipulation | The human directly controls the robot’s arms and manipulates the cube. | Immediate feedback, tactile feel. | Limited speed, potential for errors. |
| Graphical User Interface (GUI) | A visual interface where the user clicks buttons or selects actions. | Precise control, easy to learn, suitable for complex sequences. | Potential lag between input and action, requires visual attention. |
| Voice Control | The human issues verbal commands to the robot. | Hands-free operation, natural interaction. | Potential for misinterpretations, requires specific vocabulary. |
| Gesture Recognition | The robot’s sensors detect hand movements to control its actions. | Intuitive, natural interaction, potentially hands-free. | Requires specific training for the recognition system, potentially complex setup. |
Self-Solving Rubik’s Cube Mechanisms
Unveiling the intricate world of self-solving Rubik’s Cubes reveals a fascinating interplay of algorithms and robotics. These mechanisms, far from simple, represent a significant leap in automation and computational power. Beyond the mechanical prowess, understanding the logic behind these algorithms provides a deeper appreciation for the complex problem-solving capabilities embedded within.The self-solving process is fundamentally a series of meticulously crafted instructions that guide the cube’s movement.
These instructions are algorithms, meticulously designed to systematically solve the cube from any starting configuration. The core concept revolves around a set of moves that, when executed in a precise order, restore the cube to its solved state.
Different Algorithms Used for Self-Solving
Various algorithms are employed to solve a Rubik’s Cube, each with its own strengths and weaknesses. The most prevalent algorithms rely on a systematic approach, tackling layers of the cube one at a time. These algorithms, often based on pattern recognition, allow the system to effectively navigate the complex relationships between the cube’s pieces. Some popular methods include layer-by-layer algorithms, which focus on establishing a solved base and then extending it to the upper layers.
Other approaches involve more sophisticated algorithms that reduce the overall number of moves, achieving optimal solutions.
Logic Behind a Self-Solving Algorithm
The logic behind a self-solving algorithm is built upon a foundation of systematic move sequences. These sequences are designed to manipulate the cube’s pieces in a controlled manner, gradually transforming the scrambled state into a solved state. A crucial aspect of this logic is the ability to identify and categorize the pieces’ positions and orientations. This categorization allows the algorithm to apply the appropriate sequence of moves to restore the cube to its original state.
Furthermore, the algorithm must be adaptable to different initial cube states, ensuring that it can successfully navigate the vast range of possible scrambled configurations.
Comparison of Algorithm Effectiveness
The effectiveness of various algorithms in solving a Rubik’s Cube depends on several factors. Crucially, the number of moves required to solve the cube is a key metric. Algorithms designed for optimal solutions strive to minimize the number of moves. However, simplicity of implementation is also important. Algorithms that are easily translated into robotic instructions often yield more practical implementations.
The speed at which the algorithm executes on a given system is another critical factor. Algorithms that can be implemented efficiently on robotic hardware, using minimal processing power, are superior.
Adaptation to Different Initial Cube States
A robust self-solving algorithm must adapt to various initial cube states. This adaptability stems from its ability to identify and categorize the pieces’ positions and orientations, even when the cube is significantly scrambled. The algorithm can achieve this through the use of pattern recognition. The algorithm recognizes specific patterns of piece arrangement and applies the corresponding move sequences.
This allows it to handle a broad spectrum of cube configurations, effectively solving the cube regardless of the initial scramble.
Ever thought about a robot solving Rubik’s Cubes with a human controller? It’s fascinating to imagine the intricate algorithms needed for such a project. While that’s still a work in progress, it’s interesting to note that companies like Spotify are also making big moves, raising another $500 million in funding, spotify raising another 500 million. This suggests a significant investment in AI and algorithmic development, which could potentially accelerate progress in robotic Rubik’s Cube solving as well.
It’s all a fascinating race to the future of automation, isn’t it?
Steps in a Self-Solving Algorithm
| Step Number | Action | Description |
|---|---|---|
| 1 | Identify the initial state | The algorithm starts by assessing the current arrangement of the cube’s pieces. |
| 2 | Apply initial layer algorithm | A specific sequence of moves is applied to solve the first layer of the cube. |
| 3 | Apply middle layer algorithm | Moves are performed to solve the middle layer, incorporating the pieces into the partially solved structure. |
| 4 | Apply final layer algorithm | The last layer is solved, ensuring all pieces are correctly oriented and positioned. |
| 5 | Verify the solution | The algorithm checks for the solved state and verifies the final configuration. |
Integration and Interaction
The Rubik’s Cube, a seemingly simple puzzle, presents a fascinating challenge for robotics. Successfully integrating robot control, human input, and self-solving algorithms requires careful consideration of their interplay. This involves understanding how these three elements can work together to achieve optimal results, and how conflicts between them can be mitigated. A well-designed system can provide a powerful tool for both puzzle enthusiasts and researchers alike.The core challenge lies in the delicate balance between autonomous action and human intervention.
A system that is too reliant on the robot’s self-solving algorithm might miss opportunities for creative or faster solutions. Conversely, a system that is overly responsive to human input could become unwieldy and inefficient. Finding the sweet spot where these three approaches complement each other is crucial.
Robot Control Integration
The robot’s control mechanism is the foundation for physical manipulation of the cube. Precise motor control is essential for accurate and repeatable movements. The robot must be able to interpret commands from the human controller and execute them with minimal error. Feedback loops are vital to ensure the robot is aware of the cube’s current state, and to allow the self-solving algorithm to adapt to the ongoing process.
The robot should be able to recognize and respond to human overrides quickly and efficiently.
Human Input and Override
Human intervention provides the flexibility and creativity that a purely algorithmic approach lacks. A human controller can guide the robot through complex or intuitive strategies, providing an extra layer of intelligence. The human interface should be intuitive and responsive, allowing for immediate adjustments to the robot’s actions. A clear visual display of the cube’s current state, along with the robot’s current actions, is critical for effective human control.
Self-Solving Algorithm Adaptation
The self-solving algorithm should be adaptive and continuously update its approach based on the cube’s current state. This adaptation is crucial for efficiently solving the cube, especially when the robot’s movements are influenced by human input. The algorithm should be able to quickly learn from mistakes and adjust its strategies based on the current configuration. A well-designed algorithm can anticipate potential problems and adjust its course accordingly.
Ever wonder about robots solving Rubik’s Cubes with human controllers? It’s fascinating how intricate algorithms can be applied. Similar to the intricate legal battles over border official’s right to search laptops and phones, border officials court ruling aclu laptop phone searches highlight the complexities of balancing security with individual rights. This fascinating interplay of technology and law makes me wonder about the future of robotic problem-solving, and how it might evolve in the face of similar legal and ethical considerations.
System Design
A system that incorporates all three elements would feature a hierarchical control structure. The human controller would have the highest level of authority, able to override the robot’s actions or provide specific instructions. The robot’s control system would be responsible for translating these instructions into physical movements. The self-solving algorithm would run in the background, constantly evaluating the cube’s state and generating potential moves.
The algorithm would prioritize moves that align with the human’s input and the robot’s current plan.
Visual Representation of Interactions
Imagine a flow chart with three interconnected branches:* Human Controller: This branch represents the human input, with arrows indicating commands to the robot. A dashed line would connect to the robot, indicating override capability.* Robot Control: This branch shows the robot’s execution of commands. Arrows represent the physical movements of the robot’s arms and the cube. A feedback loop would be connected to the self-solving algorithm.* Self-Solving Algorithm: This branch represents the algorithm’s constant assessment of the cube’s state and generation of potential moves.
Arrows would show the algorithm updating its strategy based on the cube’s configuration and human input. A feedback loop would be connected to the robot control, updating the algorithm. A dashed line would connect to the human controller, showing the algorithm’s response to human overrides.The three branches interact and influence each other in a dynamic and iterative way.
Ever wondered if a robot could solve a Rubik’s Cube with human control? It’s a fascinating concept, and the potential for self-solving mechanisms is incredibly intriguing. This ties in with the complexities of JRR token cryptocurrency one ring Lord of the Rings in the sense that both represent a complex, almost magical, manipulation of a system.
Ultimately, the core question remains the same: how can we best program a robot to master a Rubik’s Cube with human input?
Illustrative Examples
Delving deeper into the practical applications of our Rubik’s Cube system, we’ll now examine hypothetical implementations of a robot, human interaction, and a self-solving algorithm. These examples provide tangible models for how these interconnected elements can function in a real-world scenario.
Robot Design for Rubik’s Cube Solving
A robotic arm, specifically designed for Rubik’s Cube manipulation, is envisioned with six degrees of freedom. This allows for precise control over each of the cube’s faces. The robot’s grippers are meticulously crafted for gentle yet firm handling of the cube’s small facets. Sensors embedded within the grippers provide feedback on the cube’s orientation, enabling the robot to precisely identify the position of each color.
A sophisticated camera system provides a comprehensive view of the entire cube, facilitating accurate assessment of the cube’s state. The robot’s movements are carefully programmed, following a pre-defined sequence, ensuring no accidental damage or mishaps during manipulation.
Human Interaction with the Robot
Humans can interact with the robot via a user-friendly interface, either a touch screen or voice commands. The interface will display the current state of the cube, and allow the user to select a specific algorithm or set a custom goal. For instance, a user could input a desired sequence of rotations for the robot to execute, or a specific solved configuration.
The system can provide real-time feedback to the user on the robot’s progress. The robot’s actions are recorded and displayed to ensure the user understands and can replicate the process.
Self-Solving Algorithm
A self-solving algorithm utilizes a sophisticated approach based on heuristic search and optimization. It considers the cube’s current state and determines the optimal sequence of moves to reach the solved state. The algorithm will account for various possible configurations and paths, minimizing the number of steps needed. An important part of this algorithm is the ability to handle unexpected configurations, like a cube with an unknown or non-standard initial arrangement.
Handling Unexpected Configurations
The self-solving algorithm incorporates a contingency plan to address non-standard initial configurations. It employs a combination of pattern recognition and heuristic analysis. For example, if a portion of the cube’s structure is significantly scrambled, the algorithm will prioritize fixing those areas first, then applying standard algorithms to the remaining sections. This strategy aims to quickly address the most significant issues and efficiently recover from unexpected initial states.
Visual Explanation of Interaction
Imagine a Rubik’s Cube resting on a table. A robotic arm, equipped with advanced sensors, gently picks up the cube. The robot’s camera system captures the current state of the cube, which is then analyzed by the self-solving algorithm. The algorithm identifies a specific sequence of moves—a sequence that is displayed visually on a screen. The robot’s arm follows the instructions, performing the necessary rotations on the cube.
Each movement is carefully controlled and monitored by the algorithm to ensure accuracy and efficiency. The process continues until the cube is solved. This visual representation illustrates the smooth interaction between the human, the robot, and the self-solving algorithm, each component playing a crucial role in the overall process.
Closing Summary
In conclusion, the Rubik’s Cube robot human controller self solving project demonstrates the remarkable capabilities of modern robotics and algorithms. It highlights the power of human-robot collaboration and the potential for autonomous systems. While intricate, the integration of these three components reveals the path towards creating more sophisticated and intelligent machines, capable of performing complex tasks with human guidance or independently.
The future of such systems holds immense potential for advancements in various fields.